




Մանիպուլյատոր սեղմակով
Ներածություն
ա) Նույն ուժով կոշտ ձեռքի օժանդակ մանիպուլյատորը կարող է հավասարակշռել 2-ից մինչև 500 կգ տարբեր կշիռներ։
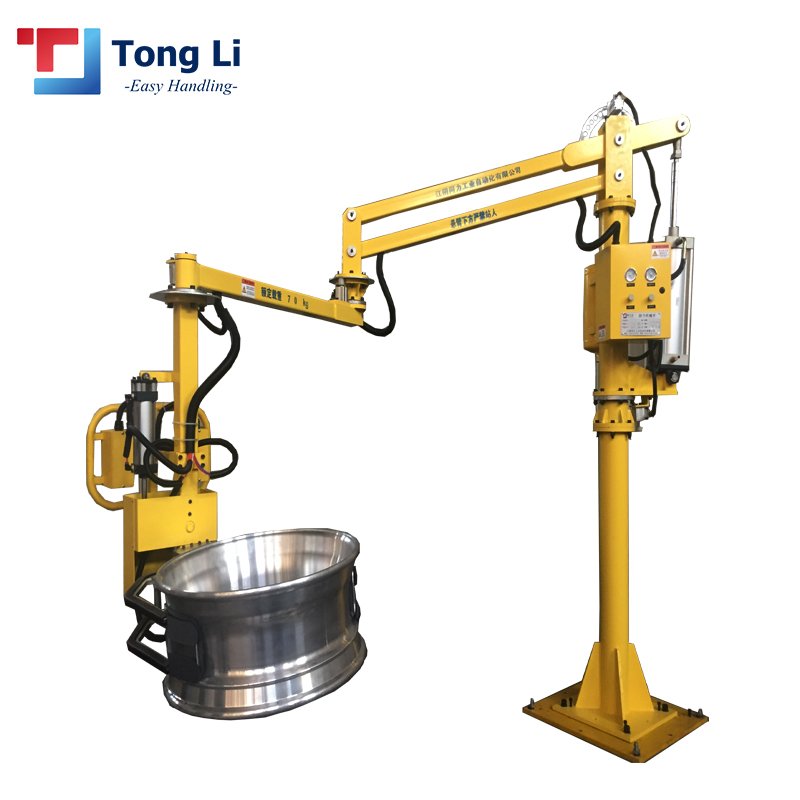
բ) Էլեկտրաէներգիայի օժանդակությամբ մանիպուլյատորը կազմված է հավասարակշռման սարքից, բռնող հարմարանքից և տեղադրման կառուցվածքից։
գ) Մանիպուլյատոր-հոսթը հիմնական սարքն է, որն իրականացնում է նյութերի (կամ աշխատանքային մասերի) ոչ գրավիտացիոն լողացող վիճակը օդում։
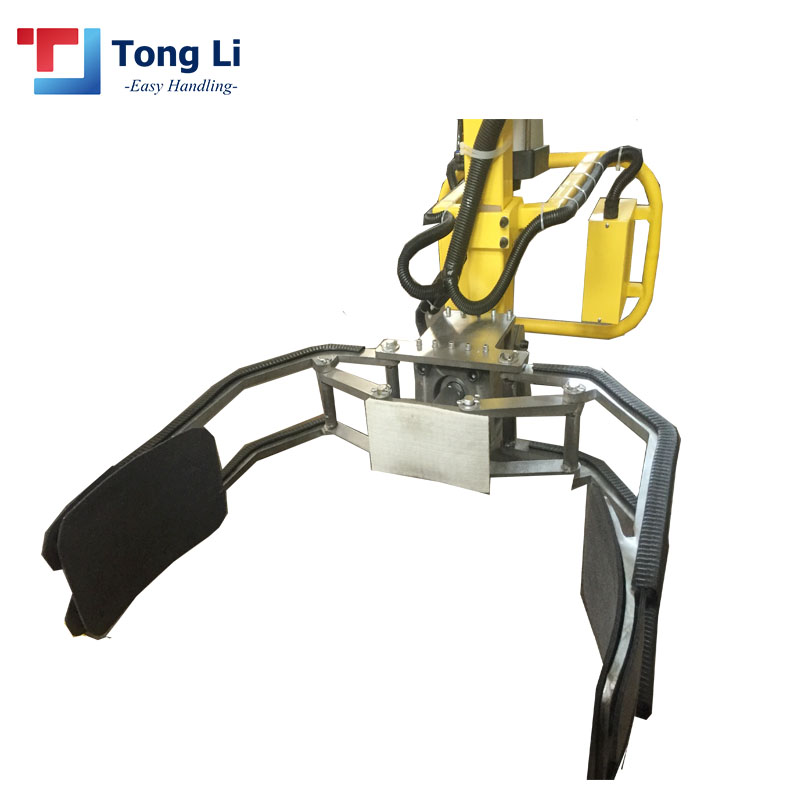
դ) Մանիպուլյատորը սարք է, որն իրականացնում է աշխատանքային մասի բռնումը և կատարում է օգտագործողի համապատասխան մշակման և հավաքման պահանջները։
ե) Տեղադրման կառուցվածքը մեխանիզմ է, որը պահում է սարքավորումների ամբողջ հավաքածուն՝ համաձայն օգտագործողի սպասարկման տարածքի և տեղանքի պայմանների։

| Սարքավորման մոդել | TLJXS-YB-50 | TLJXS-YB-100 | TLJXS-YB-200 | TLJXS-YB-300 |
| Տարողունակություն | 50 կգ | 100 կգ | 200 կգ | 300 կգ |
| Աշխատանքային շառավիղ | 2500 մմ | 2500 մմ | 2500 մմ | 2500 մմ |
| Բարձրացման բարձրություն | 1500 մմ | 1500 մմ | 1500 մմ | 1500 մմ |
| Օդի ճնշումը | 0.5-0.8 ՄՊա | 0.5-0.8 ՄՊա | 0.5-0.8 ՄՊա | 0.5-0.8 ՄՊա |
| Պտտման անկյուն Ա | 360° | 360° | 360° | 360° |
| Պտտման անկյուն B | 300° | 300° | 300° | 300° |
| Պտտման անկյուն C | 360° | 360° | 360° | 360° |






ա) Այն կարող է իրականացնել տարբեր քաշ ունեցող նյութերի գրավիտացիոն հավասարակշռության վիճակը, որը հարմար է նյութերի ճշգրիտ փոխանցման գործողության համար։
բ) Երբ մշակվում են առանց բեռի, լրիվ բեռով և տարբեր աշխատանքային մասեր, համակարգը կարող է զգալ քաշի փոփոխությունը և գիտակցել բեռի լողացող վիճակը եռաչափ տարածության մեջ, ինչը հարմար է ճշգրիտ դիրքավորման համար։
գ) Լիարժեք հավասարակշռության, սահուն շարժման և այլնի բնութագրերը թույլ են տալիս օպերատորին հեշտությամբ իրականացնել աշխատանքային մասի մշակումը, դիրքավորումը և հավաքումը։
դ) Կոշտ թևը կարող է ստիպել մանիպուլյատորին տեղափոխել աշխատանքային մասը խոչընդոտների վրայով. հորիզոնական թևը կարող է բավարարել նյութերի հորիզոնական տեղադրման և հորիզոնական հեռացման պահանջները համապատասխան տեղերում։
ե) Համակարգը կարող է միշտ պահպանել մանիպուլյատորի գլխիկի մակարդակը և ցուցաբերել բարձր աշխատունակություն։
զ) Հոդային արգելակային սարք՝ բազմաթիվ պտտվող միացումներով՝ նյութի հավաքումն ու տեղադրումը լայն տարածքում իրականացնելու համար։ Հագեցած արգելակային սարքով օպերատորը կարող է ընդհատել մանիպուլյատորի շարժումը գործողության ընթացքում ցանկացած պահի։



Այս տեսակի հզոր մանիպուլյատորը կարող է բարձրացնել մինչև 500 կգ աշխատանքային մաս։ Աշխատանքային շառավիղը մոտ 2500 մմ է, իսկ բարձրությունը՝ մոտ 1500 մմ։ Կախված բեռնվող աշխատանքային մասի քաշից, պետք է ընտրել մեքենայի ամենափոքր տեսակը՝ համապատասխան աշխատանքային մասի առավելագույն քաշին։ Եթե մենք օգտագործում ենք 200 կգ առավելագույն բեռ մանիպուլյատոր՝ 30 կգ աշխատանքային մաս տեղափոխելու համար, ապա աշխատանքային կատարողականը, անշուշտ, լավը չէ, այն շատ ծանր է թվում։ Սարքավորումը ստանդարտ կերպով հագեցած է օդի պահեստավորման բաքով, որը կարող է գործողությունների ցիկլը կատարել գազի անջատման դեպքում։ Միևնույն ժամանակ, այն կազդարարի օպերատորին հիշեցնելու համար։ Երբ օդի ճնշումը որոշակիորեն իջնի, այն կսկսի ինքնակողպման գործառույթը՝ աշխատանքային մասի անկումը կանխելու համար։ Մանիպուլյատորն ունի անվտանգության համակարգ, մշակման ընթացքում կամ աշխատանքային մասը չի տեղադրվում անվտանգ կայանում, օպերատորը չի կարող այն ազատել։ Տարբեր ոչ ստանդարտ հարմարանքների շնորհիվ, կոշտ բռնակով հզոր մանիպուլյատորը կարող է հեշտությամբ կատարել տարբեր գործընթացային գործողություններ։





